ROBIMSS
Robotique, instrumentation et manipulation aux petites échelles

Les recherches menées par l'équipe ROBIMSS portent sur l'exploitation des phénomènes physiques présents aux échelles micro et nanométriques pour concevoir des principes innovants d'actionnement, de manipulation, et de mesure intégrés aux systèmes robotiques.
Contexte
La maîtrise des petites échelles constitue un enjeu majeur pour de nombreuses disciplines scientifiques et applications technologiques. La manipulation, l’assemblage et la caractérisation d’objets de dimensions inferieures au millimètre sont de véritables défis. Ces objets peuvent être naturels (cellules, ADN, fragments de fossile, pollens, foraminifères, etc.) ou artificiels (métamatériaux, microbilles magnétiques, microbilles de polystyrène, etc.)
Cependant, le positionnement précis de ces objets de très petite taille, leur visualisation et leur caractérisation restent des verrous à lever. Le positionnement de ces objets nécessite le développement de systèmes robotiques dédiés, utilisant des techniques d’actionnement exploitant les effets physiques prédominants à ces échelles, où la gravité devient négligeable devant les forces surfaciques. Face à cette complexité, l'équipe développe une approche de conception basée sur l'optimisation topologique pour garantir des conceptions optimales de ces systèmes. L’intégration de mesures de position ou de force au sein de ces systèmes robotiques requiert également le développement de capteurs innovants. Par ailleurs, la caractérisation de petits objets nécessite de recourir à des microscopes, optiques ou électroniques, et de développer des algorithmes de traitement d’images dédiés à ces imageurs. Les forces mises en jeu à cette échelle, de l’ordre du pico newton ou nano newton, ne peuvent pas être mesurées avec des capteurs issus du commerce ce qui requiert le développement de capteurs originaux.
Dans ce contexte, l’équipe ROBIMSS propose une approche originale exploitant les effets physiques très particuliers des petites échelles pour développer des systèmes de métrologie, d’actionnement, de mesure et des algorithmes de traitement d’images dédiés aux échelles micro et nanométriques.
Objectifs et Thématiques scientifiques
Les recherches menées dans cette équipe sont consacrées à la conception, la modélisation et le développement de stratégies de commande de ces systèmes robotiques originaux. Une très grande importance est donnée à la validation expérimentale des méthodologies proposées. Les prototypes sont développés au sein du Centre de Micro et Nano Robotique, et les plus aboutis font l’objet de transfert industriel.
L’équipe ROBIMSS est structurée en quatre thèmes scientifiques :
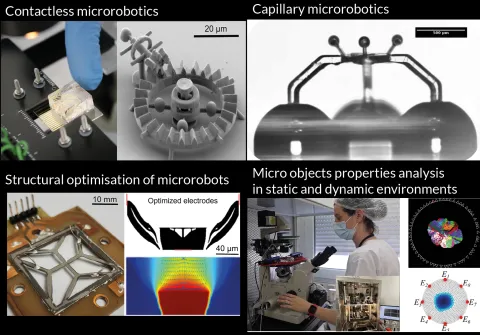
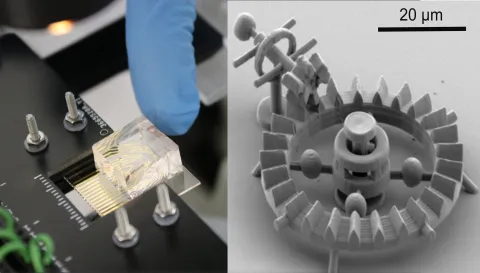
- Le thème "Microrobotique sans contact" développe des systèmes microrobotiques basés sur l'utilisation de champs de force générés à distance pour l'actionnement d'objets microscopiques (généralement entre quelques micromètres et quelques centaines de micromètres). A petite échelle, des effets physiques variés permettent d'appliquer des efforts, comme les effets thermiques ou optiques, les champs électriques ou les champs magnétiques pour n'en citer que quelques-uns. Pour tirer parti de ces particularités des petites échelles et développer des systèmes robotiques basés sur ces principes, nous nous intéressons à la modélisation de ces effets physiques, de manière à proposer des modèles qui sont calculables et inversables en temps réel de manière à les inclure dans des boucles de commande, ainsi qu'à la fabrication et au contrôle de ces dispositifs microrobotiques. Leur conception se fait en étroite interaction avec le thème "Optimisation structurelle". Les boucles de rétroaction des lois de commande sont basées soit sur du traitement d'images issues des microscopes, soit basées sur d'autres modalités étudiées dans le thème "Robotique capillaire".
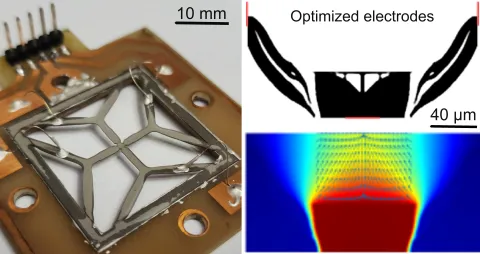
- Le thème "Optimisation structurelle de microrobots" porte sur la conception de systèmes micro-robotiques et micro-mécatroniques. Ces systèmes intègrent généralement des fonctions d'actionnement, de perception et d'intelligence dans un espace réduit. La conception optimale de tels systèmes reste donc difficile par simple intuition car les phénomènes physiques utilisés sont souvent négligeables à l’échelle macroscopique. Par ailleurs, à mesure de les miniaturiser, ils présentent une forte densité d’intégration fonctionnelle qui rend les frontières entre la structure et ses mécanismes d’actionnement et de mesure de plus en plus floues. L’approche originale proposée est d’utiliser l’optimisation structurelle reposant sur des outils méthodologiques à base d'optimisation topologique mono et multi-matériaux pour garantir des conceptions optimales de ces systèmes. Le thème accorde également un intérêt particulier à implémentation numérique de ces outils. Les résultats issus de cette thématique concernent notamment la conception optimale et la caractérisation d'actionneurs piézoélectriques intégrés, de récupérateurs d’énergie piézoélectrique et d'actionneurs électrostatiques. L’association de ces outils méthodologiques avec les développements numériques et expérimentaux, confère à cette thématique de recherche un positionnement original au niveau national et international.
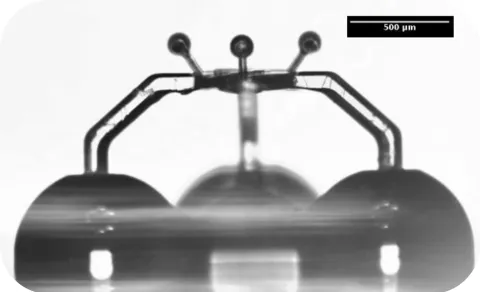
- Le thème "Robotique capillaire" se concentre sur l’exploitation des forces de tension superficielle dans les microsystèmes afin d’améliorer la compacité des microrobots. La tension superficielle qui apparaît à l’interface entre deux fluides est une force dominante pour les systèmes de l’ordre du millimètre, car elle évolue de manière linéaire en fonction de la taille. Elle permet des phénomènes tels que les effets capillaires et la locomotion des araignées d’eau. Malgré son importance en physique et en chimie, son potentiel dans les micromécanismes reste un défi majeur. Ce thème aborde plusieurs aspects : tout d’abord, les articulations liquides, constituées de gouttelettes reliant deux solides à la manière d’articulations mécaniques, sont étudiées pour leur souplesse naturelle, leur potentiel d’actionnement et de détection.
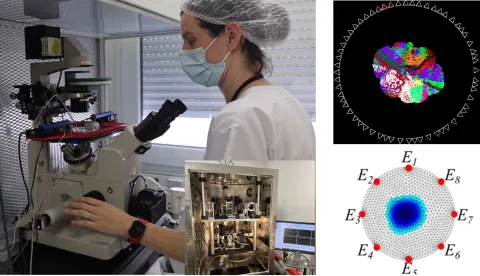
- Le thème “Analyse des propriétés des micro-objets dans des environnements statiques et dynamiques” rassemble des recherches dédiées à la perception, à l’estimation et à l’analyse des propriétés physiques d’objets aux petites échelles, qu’ils soient artificiels ou biologiques. Les travaux menés visent à caractériser ces propriétés physiques dans des environnements statiques ou dynamiques qui peuvent être interactifs, complexes et incertains. Les domaines d’application sont ceux de l’instrumentation physique, de la microrobotique et de la micromanipulation de précision avec possiblement une composante biomédicale. Le groupe développe des approches fondées soit sur l’enrichissement de fonctionnalités de caractérisation présentes dans des instrumentation avancées déjà existantes, soit sur le développement et l’interfaçage de nouveaux capteurs et actionneurs intégrés dans des plateformes de mesure et de caractérisation. Pour cela, le groupe s’appuie sur différentes approches disciplinaires comme l’Automatique pour les systèmes dynamiques incertains et le traitement du signal et des images. Ce socle est complété par des approches d’optimisation et de résolution de problèmes inverses qui sont spécifiques aux systèmes robotisés et aux méthodologies de traitement qui sont développés.
1- Une partie des travaux s’intéresse à la localisation de petits objets en mouvement à partir de mesures électriques obtenues à la frontière d’un domaine fermé. Cela met typiquement en jeu des approches inspirées de la tomographie par impédance électrique et des méthodes basées données.
2- Une autre partie s’intéresse au développement d’instrumentations scientifiques à base de Ressorts Magnétiques Autostabilisés (RMA) pour générer et mesurer des faibles forces (<1 µN). L’incertitude associée à ces forces est également évaluée en régime dynamique grâce à une méthodologie d’estimation novatrice qui utilise les observateurs d’entrée inconnue et l’analyse par intervalle. Ces travaux servent par exemple à caractériser la raideur de microstructures micro-usinées ou microfabriquées en salle blanche. Elles sont également utilisées pour caractériser le comportement mécanique de cellules biologiques non adhérentes telles que des ovocytes humains.
3- Une dernière partie développe une microscopie électronique 3D surfacique dans le but de réaliser l’analyse 3D d’échantillons microscopiques par la métrologie de leur surface et de leur géométrie. Des exemples typiques sont les grains de pollen, les foraminifères, les poudres métalliques, les motifs de texturation. Les problèmes scientifiques à résoudre comprennent le prélèvement robotisé d’échantillons individuels dans des vracs, l’acquisition automatisée d’images, le débruitage d’images et la reconstruction 3D.
Savoir-faire
L'équipe ROBIMSS est spécialisée dans :
- La modélisation, conception, fabrication et commande de systèmes robotiques dédiés à la manipulation d'objets de taille micrométrique (10 à 500 µm) à l'aide de champs de forces appliqués à distance, tels que les champs électriques et magnétiques, ou encore les effets optiques et thermiques.
- La conception d'architectures microrobotiques exploitant les interfaces fluides comme sources de mobilité et d'actionnement.
- Le développement et l’implémentation numérique d'outils méthodologiques de conception basés sur l'optimisation structurelle, en particulier l'optimisation topologique.
- Le développement de méthodes de mesure (force, position, vision, reconstruction 3D) et d'instrumentations innovantes pour la caractérisation des propriétés des micro-objets dans des environnements statiques ou dynamiques soumis à des incertitudes.
Mise en œuvre
L’équipe ROBIMSS attache une grande importance au développement de dispositifs expérimentaux et de démonstrateurs permettant de valider les méthodologies scientifiques proposées, et d’adresser les verrous technologiques inhérents aux petites échelles. Nous pouvons citer notamment :
- La réalisation de microrobots (sans contact et capillaires) par des techniques de microfabrication en salle blanche, impression multi-matériaux et impression 4D ou in-situ MEB (Microscope Electronique à Balayage) grâce aux moyens du Centre Micro et Nano Robotique (CMNR), membre du réseau Robotex (PIA equipex) ;
- La réalisation d’actionneurs piézoélectriques et de récupérateurs d'énergie par usinage laser FemtoSecond.
- Le développement et l’implémentation d’algorithmes de reconstruction 3D automatique de petits objets à partir d’observations in situ réalisées par un microscope électronique à balayage (MEB)
- Le développement de plateformes et de procédures expérimentales visant principalement à caractériser les propriétés mécaniques d’objet biologique (ovocytes) dans des environnements contrôlés.
Thème microrobotique sans contact
Thème microrobotique capillaire
Thème optimisation structurelle des microrobots
Analyse des propriétés des micro-objets dans des environnements statiques et dynamiques