Vous êtes ici
OMNI
Contexte
L’équipe OMNI est localisée sur 2 sites : Montbéliard et Belfort. Elle est composée de 3 professeurs des universités et 14 Maîtres de conférences. Les activités de l'équipe OMNI portent sur les principes, techniques, applications et planification des systèmes distribués et mobiles. Ces thématiques sont séparées en trois grands axes, Distributed Intelligent Micro Systems (DiMems), Réseau sans fil et mobilité, et Planification et Ordonnancement.
L'équipe collabore avec des institutions académiques, tant internationales (CMU USA, LIMMS Japon, PU Hong-Kong, FORTH Grèce etc.) que nationales (IRISA, IRIT etc.), et a des partenaires industriels (PSA, Faurécia, Orange Labs, etc.) à travers des projets et des publications communes.
Objectifs et Thématiques scientifiques
L’équipe structure ses activités autour des trois thèmes scientifiques :
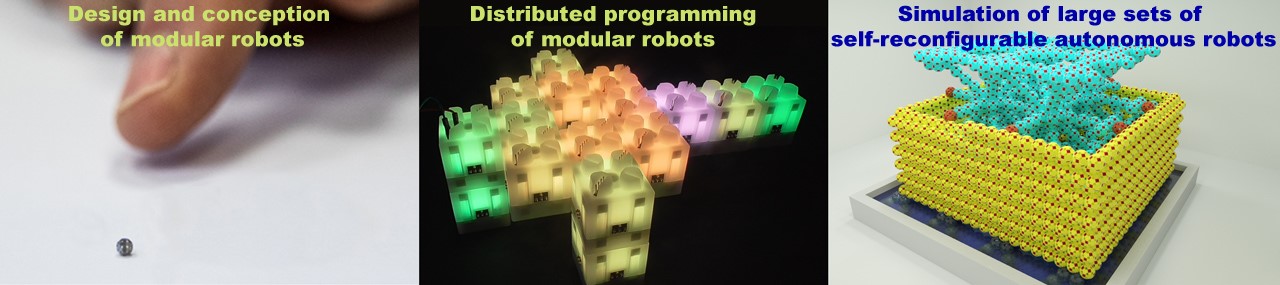
- DiMems (pour Distributed Intelligent Micro Systems) : Notre activité de recherche s’organise autour de la conception et de la réalisation de micro-robots autonomes, communicants et mobiles, elle s'inscrit dans celle du consortium Programmable Matter. L’idée principale développée dans notre groupe est de proposer des modèles informatiques pour remplacer les éléments constituant de la matière par des micro-robots pour lui ajouter de nouvelles propriétés dont la capacité de changer de forme à volonté et ainsi obtenir de la Matière Programmable auto-reconfigurable. Notre objectif est double, concevoir des robots modulaires auto-configurables dotés de senseurs leur permettant d'appréhender leur environnement proche, et proposer des algorithmes distribués qui permettent aux robots d'atteindre un but commun en échangeant des messages. Nous avons développé le simulateur dédéié aux robots modulaires : VisibleSim. Nous avons à présent fait l'acquisition d'une plateforme de validation des algorithmes distribués sur robots réels : les Blinky Blocks. Ces robots cubiques s'assemblent dans une grille cubique grâce à des aimants sur leurs faces et peuvent communiquer avec leurs voisins directs. Nous travaillons à présent sur la conception d'une nouvelle plateforme de robots pouvant se déplacer (les catoms d'environ 3 mm de diamètre) pour évaluer nos algorithmes d'auto-reconfiguration et obtenir de la Matière Programmable auto-reconfigurable.
- Réseau sans fil et mobilité : L’objectif de la thématique “Wireless Networks and Mobility” est de mobiliser les forces sous-jacentes dans les domaines de la communication et de la mobilité, en s’appuyant sur les deux principales thématiques scientifiques de la modélisation et de l’optimisation combinatoire et en considérant les réseaux sans fil comme principal sujet d’application. Les fondements de ce domaine de recherche concernent la modélisation de systèmes hétérogènes à large échelle, la conception d’algorithmes d’optimisation et la proposition de protocoles de communication radio, de protocoles de routage et de transport de données. L’évaluation de performances des solutions proposées est réalisée soit par simulation soit en situation réelle. Les principaux verrous scientifiques dans ce domaine concernent la complexité des problèmes NP-difficiles, leur modélisation, la simulation, l’émulation et le calcul dans un environnement incertain et l’adaptation dynamique dans des systèmes complexes.
- Planification et ordonnancement : Cette thématique porte sur la modélisation, l’évaluation de performances, la simulation et l’optimisation des systèmes industriels et logistiques (production et distribution de biens et de services). Les systèmes complexes étudiés sont caractérisés par la présence de tâches de transport et l’intégration de contraintes fortes et parfois atypiques. On s’intéresse à la conception (localisation et dimensionnement), la planification et l’ordonnancement des activités de production et/ou transport (personnes et marchandises). Les travaux menés pour résoudre ces problèmes concernent le développement de modèles, méthodes et algorithmes pertinents et efficaces, en recherche opérationnelle et en théorie des systèmes à évènements discrets. Ils concernent également l’analyse des données pour le diagnostic et l’optimisation des systèmes complexes. Les applications visées sont l’ordonnancement d’atelier, la logistique urbaine et la mobilité, la chaîne d’approvisionnement de l’hydrogène, la logistique portuaire…, dans le contexte de l’industrie 4.0, des Smart Cities, de l’énergie renouvelable, de l’agriculture connectée, des IoT.
Savoir-faire
Les outils scientifiques utilisés par l’équipe sont multiples. La simulation et l’émulation de systèmes DiMEMS y tiennent une large part car elles servent de support au développement d’algorithmes distribués spécifiques aux DiMEMS tels que la reconfiguration distribuée de robots modulaires. Le positionnement et la mobilité multi-échelles vise à fournir de nouvelles méthodes de positionnement allant de l’échelle métrique à l’échelle micrométrique.
Un savoir-faire unique a également été développé autour de la modélisation simulation et optimisation des réseaux sans-fils dans la bande de fréquence 1-10 THz qui permettent des communications sans-fil dans les DiMEMS mais également entre les différents cœurs de processeurs.
Liens utiles pour notre activité de recherche :
[1] Site web du projet Programmable Matter : https://www.programmable-matter.com/
[1] Vidéos présentant le Catom : https://youtu.be/JnRlneRkUis et https://youtu.be/3R3o74Afx5Y
[1] Vidéo Datom : https://youtu.be/EHuBtkRV4Jo
[1] Exemple d’utilisation des Blinky Blocks : https://youtu.be/CngeCQVWd-I
[1] Synchronisation de Blinky Blocks : https://youtu.be/xpbnbeJVz08
[1] Construction de formes avec des Catoms 3D : https://www.youtube.com/watch?v=pd5hC70UIZU
[1] Construction de formes avec des Catoms 3D https://youtu.be/s_-LyYyVnCU
[1] Vidéo YouTube d’auto-reconfiguration de Catoms 2D : https://youtu.be/XGnY-oS4Nw0
[1] Vidéo YouTube pour [ACTI-19-01] : https://youtu.be/LY2TFPWiY9o
[1] Présentation de VisibleSim en Vidéo : https://youtu.be/N09KElCbUNk





