OMNI
CONTEXT
OMNI (Optimisation, Mobility, NetworkIng) team is one of the four teams of the DISC department of the FEMTO-ST institute. It is located in two towns in East of France: Montbéliard and Belfort. It is composed of 3 full professors, 14 associate and assistant professors, and several PhD students, around half of them in each location. The OMNI team's activities focus on the principles, techniques, applications, planning and scheduling of distributed and mobile systems.
The team has collaborations with academic institutions, both international (CMU USA, LIMMS Japon, PU Hong-Kong, FORTH Greece etc.) and national (IRISA, IRIT etc.), and has industrial partners (PSA, Faurécia, Orange Labs etc.) through projects and common publications.
Goals and Research Areas
The two main research topics of the OMNI team are:
- DiMems (pour Distributed Intelligent Micro Systems) : Our activity of research is organized around the design and the production of autonomous, communicating and mobile micro-robots. It is part of the Programmable Matter consortium.
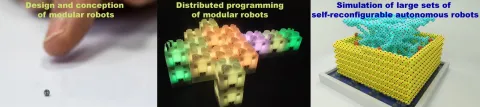
The main idea developed in our group consists in proposing computer models to replace the atoms constituting the usual matter by micro-robots in order to add new properties to it, including the ability to change shape at will, and thus obtain self-reconfigurable Programmable Matter. Our objective is twofold: design self-configurable modular robots equipped with sensors that allow them to get information from their immediate environment, and to propose distributed algorithms that allow the robots to reach a common goal by exchanging messages. The use of these new autonomous systems raises a number of complex design, optimization and planning issues. We have developed our simulator: VisibleSim dedicated to modular robots. We have now acquired a platform for validating distributed algorithms on real robots: the Blinky Blocks. These cubic robots are assembled in a cubic grid thanks to magnets on their 6 faces and can communicate with their direct neighbors. We are now working on the design of a new platform of robots that can move (the catoms, quasi-spherical robots of about 3 mm in diameter) to evaluate our self-reconfiguration algorithms and obtain self-reconfigurable Programmable Matter.
- Wireless Networks and Mobility: The vision for “Wireless Networks and Mobility” is to bring together underlying forces on the areas of Communication and Mobility, with Modelling and Approximate Methods of Combinatorial Optimization as the two main scientific topics and Wireless Networks as the main application topic. The fundamentals of this research field deal with the modelling of large-scale heterogeneous systems, the design of optimization algorithms, and the proposal of radio communication protocols, routing protocols and data transport. The performance evaluation of the proposed solutions is carried out either by simulation or in real-life situations. The main scientific challenges in this area concern the complexity of NP-hard problems, their modelling, simulation, emulation, and computation in uncertain environment, and dynamic adaptation in complex systems.
- Planning and scheduling: This theme focuses on modelling, performance evaluation, simulation and optimization of industrial and logistics systems (production and distribution of goods and services). The complex systems studied are characterized by transport tasks and the integration of strong and sometimes atypical constraints. Our research interests are related to the design (location and sizing), planning and scheduling of production and/or transport activities (people and goods). The work carried out to solve these problems concerns the development of relevant and efficient models, methods and algorithms, in operations research and in the theory of discrete event systems. They also concern data analysis for the diagnosis and optimization of complex systems. The applications targeted are workshop scheduling, urban logistics and mobility, the hydrogen supply chain, port logistics, etc., in the context of industry 4.0, Smart Cities, renewable energy, IoT, and connected agriculture.
Expertise
The scientific tools used by the OMNI team are numerous. Simulation and emulation of DiMEMS systems play an important role as they support the development of specific distributed algorithms within DiMEMS such as the distributed reconfiguration of modular robots. The multiscale positioning and mobility are intended to provide new positioning methods, from the metric to the micrometer scale.
A unique expertise has also been developed surrounding modeling, simulating and optimizing wireless networks within the 1-10 GHz band frequency, thus allowing for wireless communications in DiMEMS, but also between different processor cores.
Some links to our research activity : :
[1] Site web du projet Programmable Matter : https://www.programmable-matter.com/
[1] Vidéos présentant le Catom : https://youtu.be/JnRlneRkUis et https://youtu.be/3R3o74Afx5Y
[1] Vidéo Datom : https://youtu.be/EHuBtkRV4Jo
[1] Exemple d’utilisation des Blinky Blocks : https://youtu.be/CngeCQVWd-I
[1] Synchronisation de Blinky Blocks : https://youtu.be/xpbnbeJVz08
[1] Construction de formes avec des Catoms 3D : https://www.youtube.com/watch?v=pd5hC70UIZU
[1] Construction de formes avec des Catoms 3D https://youtu.be/s_-LyYyVnCU
[1] Vidéo YouTube d’auto-reconfiguration de Catoms 2D : https://youtu.be/XGnY-oS4Nw0
[1] Vidéo YouTube pour [ACTI-19-01] : https://youtu.be/LY2TFPWiY9o
[1] Présentation de VisibleSim en Vidéo : https://youtu.be/N09KElCbUNk
Objectifs et Thématiques scientifiques
L’équipe structure ses activités autour des trois thèmes scientifiques :
- DiMems (pour Distributed Intelligent Micro Systems) : Notre activité de recherche s’organise autour de la conception et de la réalisation de micro-robots autonomes, communicants et mobiles, elle s'inscrit dans celle du consortium Programmable Matter. L’idée principale développée dans notre groupe est de proposer des modèles informatiques pour remplacer les éléments constituant de la matière par des micro-robots pour lui ajouter de nouvelles propriétés dont la capacité de changer de forme à volonté et ainsi obtenir de la Matière Programmable auto-reconfigurable. Notre objectif est double, concevoir des robots modulaires auto-configurables dotés de senseurs leur permettant d'appréhender leur environnement proche, et proposer des algorithmes distribués qui permettent aux robots d'atteindre un but commun en échangeant des messages. Nous avons développé le simulateur dédéié aux robots modulaires : VisibleSim. Nous avons à présent fait l'acquisition d'une plateforme de validation des algorithmes distribués sur robots réels : les Blinky Blocks. Ces robots cubiques s'assemblent dans une grille cubique grâce à des aimants sur leurs faces et peuvent communiquer avec leurs voisins directs. Nous travaillons à présent sur la conception d'une nouvelle plateforme de robots pouvant se déplacer (les catoms d'environ 3 mm de diamètre) pour évaluer nos algorithmes d'auto-reconfiguration et obtenir de la Matière Programmable auto-reconfigurable.
- Réseau sans fil et mobilité : L’objectif de la thématique “Wireless Networks and Mobility” est de mobiliser les forces sous-jacentes dans les domaines de la communication et de la mobilité, en s’appuyant sur les deux principales thématiques scientifiques de la modélisation et de l’optimisation combinatoire et en considérant les réseaux sans fil comme principal sujet d’application. Les fondements de ce domaine de recherche concernent la modélisation de systèmes hétérogènes à large échelle, la conception d’algorithmes d’optimisation et la proposition de protocoles de communication radio, de protocoles de routage et de transport de données. L’évaluation de performances des solutions proposées est réalisée soit par simulation soit en situation réelle. Les principaux verrous scientifiques dans ce domaine concernent la complexité des problèmes NP-difficiles, leur modélisation, la simulation, l’émulation et le calcul dans un environnement incertain et l’adaptation dynamique dans des systèmes complexes.
- Planification et ordonnancement : Cette thématique porte sur la modélisation, l’évaluation de performances, la simulation et l’optimisation des systèmes industriels et logistiques (production et distribution de biens et de services). Les systèmes complexes étudiés sont caractérisés par la présence de tâches de transport et l’intégration de contraintes fortes et parfois atypiques. On s’intéresse à la conception (localisation et dimensionnement), la planification et l’ordonnancement des activités de production et/ou transport (personnes et marchandises). Les travaux menés pour résoudre ces problèmes concernent le développement de modèles, méthodes et algorithmes pertinents et efficaces, en recherche opérationnelle et en théorie des systèmes à évènements discrets. Ils concernent également l’analyse des données pour le diagnostic et l’optimisation des systèmes complexes. Les applications visées sont l’ordonnancement d’atelier, la logistique urbaine et la mobilité, la chaîne d’approvisionnement de l’hydrogène, la logistique portuaire…, dans le contexte de l’industrie 4.0, des Smart Cities, de l’énergie renouvelable, de l’agriculture connectée, des IoT.
Savoir-faire
Les outils scientifiques utilisés par l’équipe sont multiples. La simulation et l’émulation de systèmes DiMEMS y tiennent une large part car elles servent de support au développement d’algorithmes distribués spécifiques aux DiMEMS tels que la reconfiguration distribuée de robots modulaires. Le positionnement et la mobilité multi-échelles vise à fournir de nouvelles méthodes de positionnement allant de l’échelle métrique à l’échelle micrométrique.
Un savoir-faire unique a également été développé autour de la modélisation simulation et optimisation des réseaux sans-fils dans la bande de fréquence 1-10 THz qui permettent des communications sans-fil dans les DiMEMS mais également entre les différents cœurs de processeurs.
Liens utiles pour notre activité de recherche :
[1] Site web du projet Programmable Matter : https://www.programmable-matter.com/
[1] Vidéos présentant le Catom : https://youtu.be/JnRlneRkUis et https://youtu.be/3R3o74Afx5Y
[1] Vidéo Datom : https://youtu.be/EHuBtkRV4Jo
[1] Exemple d’utilisation des Blinky Blocks : https://youtu.be/CngeCQVWd-I
[1] Synchronisation de Blinky Blocks : https://youtu.be/xpbnbeJVz08
[1] Construction de formes avec des Catoms 3D : https://www.youtube.com/watch?v=pd5hC70UIZU
[1] Construction de formes avec des Catoms 3D https://youtu.be/s_-LyYyVnCU
[1] Vidéo YouTube d’auto-reconfiguration de Catoms 2D : https://youtu.be/XGnY-oS4Nw0
[1] Vidéo YouTube pour [ACTI-19-01] : https://youtu.be/LY2TFPWiY9o
[1] Présentation de VisibleSim en Vidéo : https://youtu.be/N09KElCbUNk





