ROBIMSS
Robotique, manipulation et instrumentation aux micro-nanoscales
Context
The control of micro and nanometric scales represents a formidable scientific and technological challenge. The manipulation, assembly and characterization of elementary objects of typical size smaller than a millimeter are real challenges. These objects can be biological (cells, natural fibers, DNA,...) or artificial (nanotubes, integrated optical components, nanocrystals, nano-antennas, metamaterials...).
However, the precise positioning of these very small objects, their visualization and their characterization remain obstacles to be overcome. Their visualization requires the use of optical or electronic microscopes and the development of image processing algorithms dedicated to these imagers. The forces involved at this scale, of the order of a pico newton or nano newton, cannot be measured with commercially available sensors, which requires the development of original sensors. The positioning of these objects requires the development of dedicated robotic systems, using actuation techniques exploiting the physical effects predominant at these scales, where gravity becomes negligible compared to surface forces. The integration of position or force measurements within these robotic systems also requires the development of innovative sensors.
In this context, the ROBIMSS team proposes an original approach exploiting the very specific physical effects of small scales to develop metrology, actuation, measurement systems and image processing algorithms dedicated to micro and nanometric scales.
scientific Objectives and themes :
The research conducted in this team is devoted to the design, modeling and development of control strategies for these original robotic systems. A great importance is given to the experimental validation of the proposed methodologies. The prototypes are developed within the Centre of Micro and Nano Robotics, and the most advanced ones are the object of industrial transfer.
The ROBIMSS team is structured in scientific themes:
- The Nanorobotics theme targets applications where the objects of interest have dimensions typically smaller than a few micrometers. Given these dimensions, robotic tasks are performed under vacuum inside the chamber of a scanning electron microscope (SEM). We are conducting work on interfacing, control, microscopy and deployment of a digital twin to transform SEMs into real microfactories capable of manufacturing different components by additive and subtractive methods but also by assembly and multiphysics characterization. Thanks to this approach, we propose new robotic principles (4D printing, folding of multilayer structures by focused ions...) allowing the realization of robots smaller than the diameter of a hair and we carry out many varied robotic tasks for different applications (manipulation, assembly and characterization for nanoelectronics, photonics, materials...)
- The Force Metrology theme and applications for dynamic environments at micro-nano scales theme studies various approaches to micro- and nano-force measurement, either for integration in robotic devices or for characterization of mechanical properties at small scales. From a formal point of view, measuring a force is equivalent to estimating the unknown exciter input of a dynamic transducer. It is an inverse problem since only the noisy output of the transducer is accessible thanks to the fact that it is not a force. It follows that this type of estimation can be associated with problems of modeling and design (transducers), observation of unknown input (force) in an uncertain context (modeling errors) and control (when the transducer is slaved). The work carried out consists in particular in developing the concept of Self-Stabilized Magnetic Springs (SSS) by using mobile masses of a few milligrams trapped in magnetic fields of low gradient. This work is carried out in a context that is progressively moving in the direction of low force metrology, thanks to the maturity and technological mastery of the solutions developed (TRL 5 to 7).
- The Perception theme develops innovative numerical methods for sample analysis by combining scanning electron microscopy, vision and robotics, and sensor data fusion methods for the localization of autonomous vehicles for proximity delivery. In the first case, the topics include automatic image acquisition, especially in fast mode, image denoising by deep learning, modeling of the acquisition process, 3D vision, visual servoing, dimensional measurement, training and conservation in palinology/paleontology. In the second case, topics include 3D-3D point and map matching, deep learning modeling, Bayesian filtering
- The Liquid and non-contact micro robotics and structural optimization theme is interested in the realization of robotic systems at the micrometric scale. In particular, it aims at using dominant small-scale physical phenomena such as dielectrophoresis forces, surface tension or the piezoelectric effect for applications of cell sorting on microfluidic chips, microactuators and 3D energy harvesting. The optimal design of such mechanisms remains difficult by simple intuition because the physical phenomena used are often negligible at the macroscopic scale. The original approach proposed is to use structural optimization based on methodological tools of topological optimization to ensure optimal designs of these microstructures.
know-how :
The ROBIMSS team is specialized in :
- the modeling, fabrication and implementation of original actuators exploiting the specificities of physics at micro and nanometric scales: actuation at the nanometric scale by origami techniques, non-contact actuation in a fluidic medium or at the air/liquid interface exploiting in particular surface tension effects, thermocapillarity, acoustic waves, dielectrophoresis or thermal actuation ;
- the study of new principles of actuation and robotic structures (multi-material printing, 4D printing, origami by ion beam folding);
- the design of micro and nanorobotic systems through structural optimization approaches, especially topological optimization;
- development of measurement tools (force, position, vision, 3D reconstruction...);
- calibration and sensor-based control of robots for ultra-precise control of positions and control of robot-environment interactions (hybrid force-position control, visual servoing, photo-robotic control, self-sensing, etc.);
- the study and implementation of human-robot collaborative control principles allowing the realization of efficient robotic tasks in an intuitive way (digital twin, collaborative control).
implementation :
The ROBIMSS team attaches great importance to the development of experimental devices to validate the proposed scientific methodologies, and to address the technological challenges inherent to the micro and nanometric scales. We can mention in particular:
- the realization of complex systems by microfabrication techniques in clean room, multi-material printing and 4D printing or in-situ SEM (Scanning Electron Microscope) thanks to the means of the Micro and NanoRobotics Center, member of the Robotex network (PIA equipex);
- the development of experimental platforms and procedures aimed mainly at characterizing materials (carbon nanotubes, plant and synthetic fibers, flexible structures), biological objects but also at realizing assemblies (optical components, photonics, micro-mechanics, micro-instruments and tools)
Image
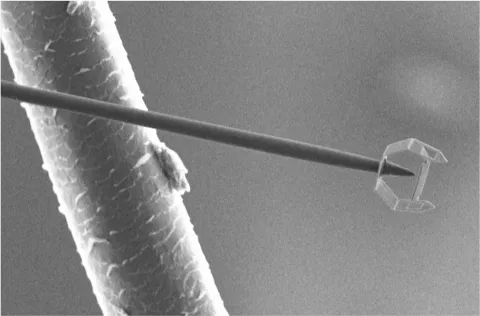
Nanorobotic Theme | Image
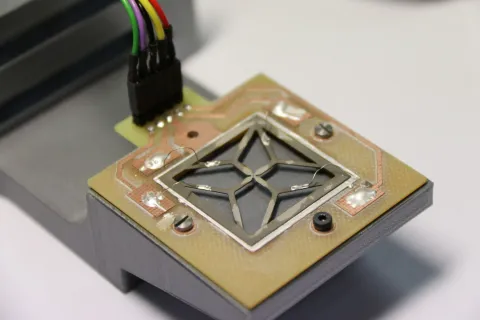
Liquid and non-contact micro robotics and structural optimization theme |





