Maxence Leveziel wins CNRS robotics thesis award
His work has led to the development of a miniature robot capable of manipulating micrometric objects at unprecedented speeds.
Since 2007, the Groupe de Recherche (GdR) Robotique du CNRS has been awarding a thesis prize to young researchers in robotics whose work has contributed to the advancement of scientific knowledge and/or technical innovations in robotics. This year, the prize was awarded to Maxence Leveziel, a UBFC doctor (ED SPIM), on October 17, 2023 at the Journées Nationales de la Recherche en Robotique in Moliets (https://www.ins2i.cnrs.fr/fr/cnrsinfo/une-doctorante-et-un-doctorant-recoivent-le-prix-de-these-2022-du-gdr-robotique/).
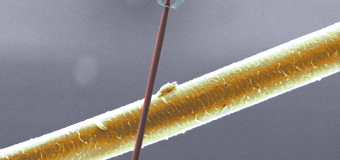
Maxence Leveziel completed his thesis at the FEMTO-ST laboratory and developed a miniature robot, MiGriBot, capable of manipulating micrometric objects, barely visible to the naked eye, at unprecedented speeds. This work was published in the prestigious journal Science Robotics in August 2022.
MiGriBot is a miniature robot capable of picking up and setting down objects from 40 micrometers to several millimeters, at cycles of up to 720 pick-up and set-down operations per minute, with sub-micrometric repeatability. This performance makes it the world's fastest pick-and-place robot on any scale.
Speed and precision are two major challenges for automated production systems and the industry of the future. This robot will be used to assemble micro-electro-mechanical and optical systems (MEMS/MOEMS) used in the electronics industry, where work rate requirements are increasingly high. Thanks to its speed and compactness, more than 2,000 robots can be placed in 1 m2 to carry out over a million operations per second! MiGriBot's very low energy consumption will also contribute to the development of compact, energy-efficient production systems to combat climate change.
This work was carried out by the RoMoCo team at the FEMTO-ST laboratory as part of the ANR JCJC MiniSoRo project (ANR-19-CE10-0004). The project was co-financed by Grand Besançon Métropole, and the thesis was co-supervised by Guillaume Laurent, Michaël Gauthier and Redwan Dahmouche
Contact : Redwan Dahmouche
[[{"fid":"32467","view_mode":"wysiwyg_350w","fields":{"format":"wysiwyg_350w","alignment":"","field_file_image_alt_text[und][0][value]":false,"field_file_image_title_text[und][0][value]":false,"external_url":""},"type":"media","field_deltas":{"2":{"format":"wysiwyg_350w","alignment":"","field_file_image_alt_text[und][0][value]":false,"field_file_image_title_text[und][0][value]":false,"external_url":""}},"attributes":{"class":"media-element file-wysiwyg-350w","data-delta":"2"}}]]












-

INGÉNIERIE
Sciences informatiques
