ThermoBot : micro robots that walk on water
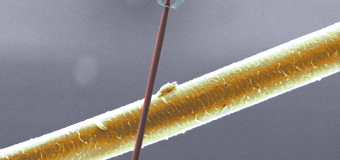
Imagine, a robot, the size of a fly, walking on the surface of the water and pursued by a laser beam. One could believe in a science fiction scenario...
It is in fact a very serious scientific development, a ThermoBot, the new Franco-Belgian microrobot that has just been revealed by the very serious scientific journal "Sciences Robotics".
Micro-robotics focuses on developing miniature robots capable of evolving in various environments to interact with a wide variety of objects such as cells in a biological environment, nanocomponents in a vacuum chamber, etc.
ThermoBots investigate an environment little explored until now by micro robotics: the air-liquid interface, an environment widely used by insects in nature.
The teams of the FEMTO-ST Institute (CNRS/UBFC) have combined their skills in microrobotics with the skills in applied physics of the Université Libre de Bruxelles to build new microrobots able to evolve on the water surface.
The principle of locomotion, also original in robotics, is based on a particular physical phenomenon: thermocapillarity. In concrete terms, a laser scans the surface of the liquid and heats it locally, inducing a complex but controlled movement of the liquid on the surface, allowing several robots placed at the air-liquid interface to move.
The research teams have shown that the Thermobots can follow a trajectory in a controlled manner with a precision of less than a millimeter at speeds that are nevertheless very high on a miniature scale (20 times the size of the robot per second, i.e. the equivalent of 200km/h for a vehicle). They also showed that this generic principle could be used to realize original assemblies of microcomponents placed on the surface of liquid. The future of these ThermoBots remains to be invented. One can imagine that they could interact with insects evolving on liquid surfaces to study their behavior or that they could be used to convey microcomponents along microchannels in a miniature factory.
Contact :
FEMTO-ST (CNRS-UBFC) : Aude Bolopion
More informations :
DOI: 10.1126/scirobotics.abd3557
See the article published in the INSIS/CNRS scientific news
See the video demonstration of the movement of the micro robot on the water surface












-

INGÉNIERIE
Sciences informatiques
